Home / Project List / Humanoid Robot
Humanoid Robot Visual SLAM, Gait Planning, and Control System Programming
Research Assistant
Supervisor: Prof. Yongduan Song & Niu Wang
-
Control the humanoid robot Roban to finish a sequence of tasks required by BOTEC
-
Developed a localization, mapping, and navigation system based on ORB, OctoMap, and move_base
-
Built the robot's model in CoppeliaSim/V-REP to simulated the control algorithm; controlled the gait using a dynamic model which derived from Lagrangian dynamics when it stands on one leg

The Roban Robot
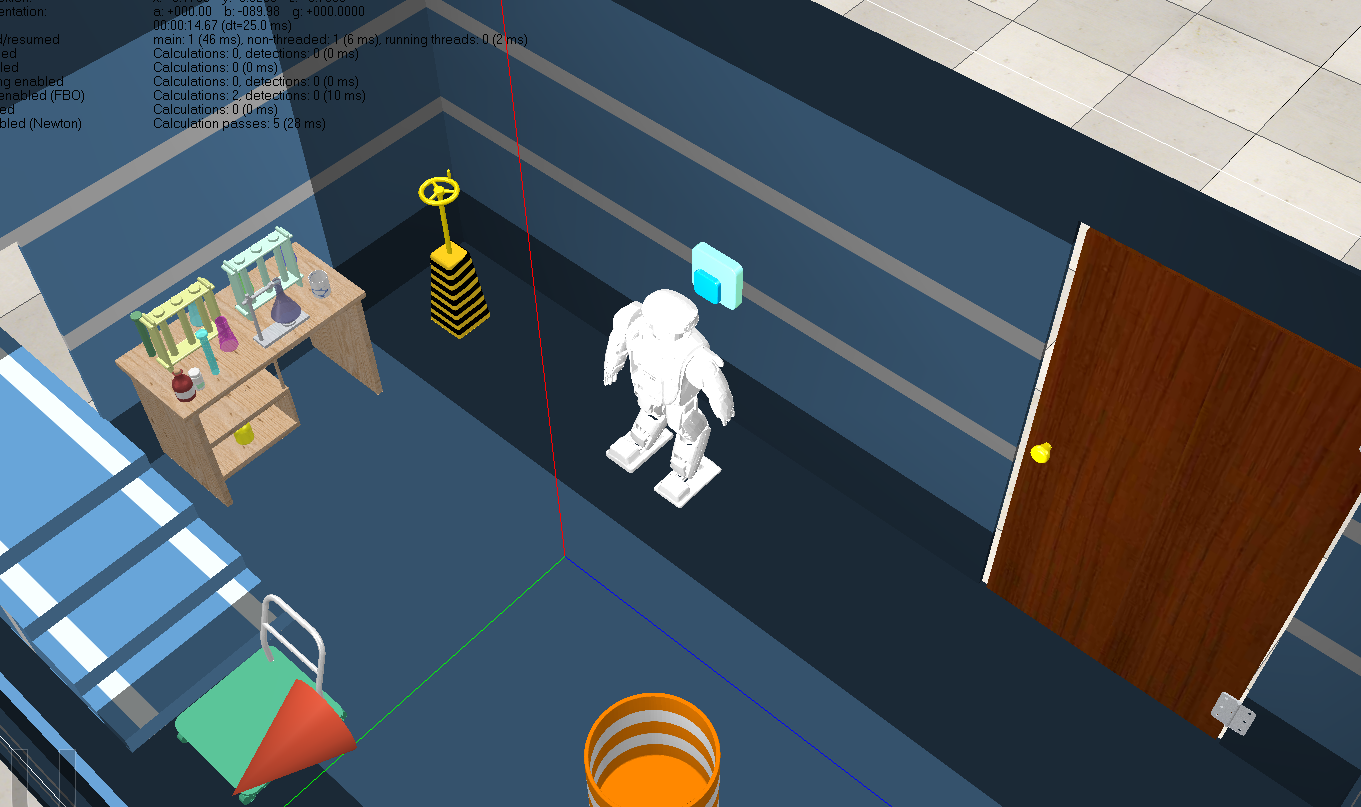
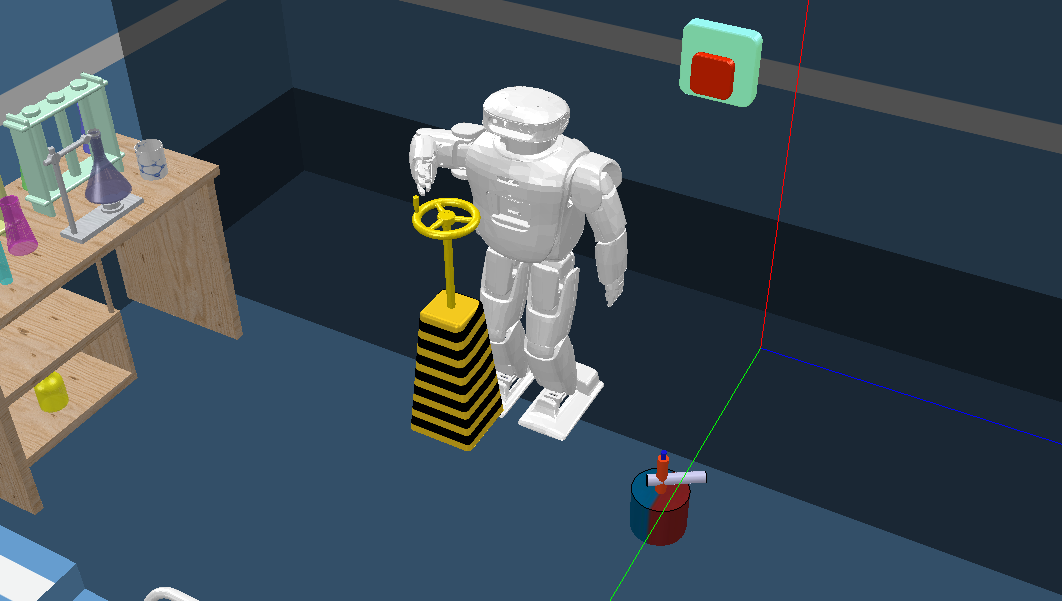
Robot Simulation (in V-REP)
